<th id="ljlhm"></th>
<th id="ljlhm"></th>
隨著點膠工業需求的不斷發展,點膠機器人被廣泛使用。針對傳統點膠機器人空間性、靈活性不足的行業性問題,深圳市世椿智能裝備股份有限公司(簡稱世椿智能)推出“工業機器人+3D視覺技術”柔性點膠解決方案,為客戶提供點膠精度、可靠性和自動化水平更高的服務。
世椿智能“工業機器人+3D視覺技術”的成功結合帶來了許多關鍵性突破,包括高精度定位和導航、智能識別和檢測、高靈活性、高適應性、高協作性等,改善了工業生產的效率、準確性和安全性,在提升工業制造業的競爭力和發展方面發揮了重要作用。
3D視覺技術賦予工業機器人“慧眼”,推動智能制造轉型升級
在人工智能、機器人、生物識別、物聯網等產業快速發展的背景下,制造業智能制造轉型不斷深入,機器視覺技術愈發受到關注。業內人士指出,在中國制造2025和工業4.0雙重影響下,中國機器視覺市場火爆,預計未來五年將會以每年20%平均增長率持續增長。工業機器人是中國乃至全球制造業發展的重要支撐,而3D視覺作為工業機器人之眼,對工業機器人的行業應用前景產生深遠影響。據Grand View Research預測,到2027年,全球3D機器視覺市場規模預計將達到34.6億美元,3D機器視覺強勁的技術價值將成為推動市場持續增長的重要因素。
目前,市場自動化程度越來越高,機器視覺在工業中已經得到普遍應用。機器視覺對于提高工業機器人的靈活性和可操作性具有重要意義,在大批量工業生產過程中,3D視覺助力機器人實現更多高精度動作,拓寬其應用場景,也大大提高了生產效率和柔性化程度。通過學習和分析三維圖像數據,工業機器人能夠適應不同的物體形狀和尺寸,自動調整姿勢以完成各種任務,成功地應用在對復雜的工件表面上進行精確的涂覆,無懼復雜圖案、緊密貼合等難題。通過3D視覺控制技術可以提高工業機器人工作的精度、速度及可靠性,“工業機器人+3D視覺技術”配套發展成為市場關注的焦點。
基于客戶產品的個體差異性較大,且產品工作端面為異形小間距端面,傳統點膠技術無法滿足需求,世椿智能綜合機器人的靈活性與3D視覺技術自適應性,展開了“工業機器人+3D視覺技術”的結合探索,開發出了“工業機器人+3D視覺技術”的相關設備、系統、軟件及模塊,以適應不同的生產需求,并成功落地應用,積累起大量客戶與典型案例。
堅持技術創新進化,“工業機器人+3D視覺技術”開花結果
基于多年的點膠工藝沉淀,世椿智能堅持技術創新進化,歷經多個階段,在產品應用和解決方案協同層面,組合打造快速柔性部署、便捷維護、更具創新價值的“工業機器人+3D視覺技術”柔性點膠解決方案,在智能制造多行業多場景應用上實現落地,為客戶帶來降本增效提質等實際服務價值。
在“工業機器人+3D視覺”技術積累階段,世椿智能進行了市場調研和技術評估,確定了機器人點膠和3D視覺技術的潛在應用和需求。同時,其也進行了相關技術的學習和培訓,為后續的研發工作做好了充足的積淀和準備;在“工業機器人+3D視覺技術”開發階段,世椿智能進行了機器人點膠和3D視覺技術的結合攻關工作。首先,研發團隊進行了相關算法和軟件工具的開發,用于實現機器人對目標物體進行識別和定位;其次,研發團隊進行了硬件系統的設計和集成,包括激光掃描器、攝像頭、機器人等設備的選型及調試;最后,研發團隊還進行了系統的測試和優化,以確保系統的穩定性和可靠性;在“工業機器人+3D視覺”技術集成和應用階段,世椿智能開始進行機器人點膠+3D視覺技術的集成和應用。通過與客戶密切合作,世椿智能在實際生產環境中安裝和調試系統,根據客戶需求進行定制化的開發,及時解決技術上的問題并作調整。
在“工業機器人+3D視覺技術”的更新迭代過程中,世椿智能還面臨了如下難點和問題:一是算法的研發和優化,機器人點膠+3D視覺技術需要精確地進行物體識別和定位,因此算法的研發和優化是一個關鍵的難點。公司需要投入大量的人力和資源來開發和改進算法,以提高系統的準確性和穩定性;二是硬件設備的選擇和集成,在機器人點膠+3D視覺技術中,選擇合適的硬件設備并進行集成是一個復雜且龐大的工作。不同的環境和應用需求可能需要不同類型的激光掃描器、攝像頭和機器人等設備,公司需要仔細評估不同的選項,并進行設備的調試和集成;三是實際生產環境的適應性,機器人點膠+3D視覺技術需要在實際生產環境中進行應用,而不同的生產環境可能存在各種挑戰和變化,公司需要針對不同的環境進行系統的優化和調整,以確保系統的穩定性和可靠性……

為了解決以上難點和問題,世椿智能采取了以下策略:一是打造強大的“工業機器人+3D視覺技術”研發團隊,包括算法工程師、硬件工程師和應用工程師等不同領域的專業人員,他們具有豐富的經驗和技術知識,能夠應對各種挑戰;二是建立維系緊密的合作伙伴關系,公司與技術供應商、戰略客戶深度合作,協同解決技術問題和改進系統,推進行業智能化、自動化升級;三是持續改進和優化,公司致力于持續精進機器人點膠+3D視覺技術,通過不斷的測試和驗證,發現并解決系統中存在的問題。同時,公司也積極收集用戶的反饋和需求,根據實際應用情況進行技術上的調整和改進。
綜上所述,在機器人點膠+3D視覺技術研發中,世椿智能經歷了技術積累、開發、集成和應用等重要階段和過程。在技術及設備的更新迭代過程中,世椿智能還面臨算法研發和優化、硬件設備的選擇和集成、實際生產環境的適應性等難點和問題。通過強大的研發團隊、緊密的合作伙伴關系和持續改進和優化的策略,世椿智能成功攻克了這些難點,并持續提供穩定可靠的機器人點膠+3D視覺技術解決方案。
持續聚焦“工業機器人+3D視覺技術”,高效賦能行業發展
在全球產業轉型加速,少人化趨勢以及政策傾斜綜合影響下,機器人作為自動化、無人化應用的通用智能載體,憑借提升工作效率、降低勞力成本等優勢,高效替代了傳統行業機械重復、高強度、招工難的工作,落地愈發增量擴面。
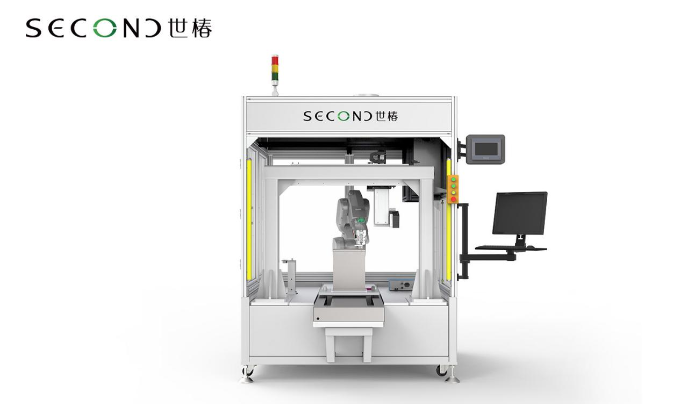
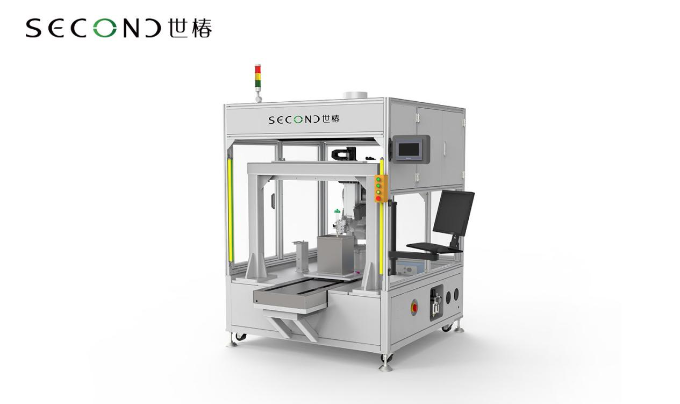
針對“工業機器人+3D視覺技術”柔性點膠解決方案,世椿智能研發的主要設備為SEC-NRB-6700,控制系統包括機器人控制柜+工控機+PLC綜合控制,軟件為世椿自主研發點膠軟件、3D視覺自動引導軟件,所包含模塊為工業機器人、3D視覺模塊、點膠系統、應用于機器人上的稱重模塊、對針模塊、移栽組件等,具有高精度(3D線掃相機引導機器人)、自適應性(有效解決產品變形)等技術特點,具有極高的產品兼容性,可應對復雜產品的點膠需求。
機器人采用國際知名的ABB IRB 1200機器人,IRB 1200第二軸無外凸,這一創新設計使其具有比其他小型機器人更長的行程,大幅縮短了機器人與工件之間的距離,而不影響其優異性能。標配IP40防護等級,可選潔凈室、IP67或鑄造專家II代防護等級。4條氣管、10路用戶信號線及以太網線,從手腕法蘭到底座全程內部走線。能以任意角度安裝,機身小巧,有效工作范圍大。
3D線掃相機采用立體視覺系統能夠對視場范圍內的標靶進行自動識別定位,可在復雜的背景環境下實現系統的現場標定。通過對運動體上特征點的識別定位并對數據進行分析進一步獲取運動體的位置、三維坐標、姿態、特征點之間的相對距離。
隨著機器人+應用走進更多場景,讓機器人擺脫機械固定模式限制,智能、柔性、交互的需求越發普遍。世椿智能“工業機器人+3D視覺技術”柔性點膠解決方案,以其高精度、高一致性、高效率、高靈活性、高適應性、低成本和實現數據分析和質量控制的特點,成為現代工業點膠生產中的重要工具,助力工業自動化邁向新的高度。
未來,世椿智能持續聚焦“工業機器人+3D視覺技術”,將圍繞算法、硬件、數據集、實踐應用四個方面開展“深耕行動”:一是持續優化算法,世椿智能將致力于改進機器人點膠+3D視覺技術的算法,提高點膠精度和效率,以適應不同的工件形狀、材料和工藝要求;二是持續改進硬件,世椿智能將不斷改進和優化機器人點膠+3D視覺技術所需的硬件設備,如3D相機、機械臂等,以提高系統性能和穩定性;三是數據集建設,世椿智能將積極收集和建立豐富的數據集,用于訓練和優化機器人點膠+3D視覺技術的模型,提高其識別和定位的準確性;四是提高實踐應用領域,世椿智能將與合作伙伴和行業用戶深度合作,將機器人點膠+3D視覺技術應用于實際生產中,不斷積累經驗并提升技術的可行性和實用性。
為了持續精進,世椿智能將密切關注最新的科技發展和行業趨勢,與相關專家和機構保持深度合作,參與技術研討會和學術交流,不斷吸收先進的研究成果和思路,并將其應用于技術研發和實踐應用中。同時,世椿智能也將關注用戶需求和反饋,持續改進和優化設備、控制系統、軟件及模塊,提供全球技術領先的高性能產品和優秀的解決方案,為“工業機器人+3D視覺技術”開拓更為廣闊的應用空間。